
We aim to fly a kite to the highest altitude in the world
Designed by Robert Moore



Copyright © 2005-2018 by Robert Moore · All Rights reserved · E-Mail:droceretik@gmail.com
Kite Altitude World Record



Winch
Line which is as slippery and thin as Dyneema, is almost impossible to handle with bare hands and even with a gloved hand, tensions more than a few kilograms are difficult to manage. Throw in very long line lengths and high tensions and and some mechanical means of controlling line in and out are essential. The winch with a capstan and reel is the machine for the job. In it's simplest form the winch or windlass is just a reel with a shaft and winding knob on it'd side. This is represented by the fixed fishing reel and the garden hose reel. Long line lengths, if wound in directly to a storage reel, accumulate tremendous compression on the reel centre. This may result in implosion of the reel and breakage of the reel sides. I discovered that after I building my first big reel (see below left). I also used many large electrician's reels in my first 18 months of exploratory flights over 1,000 ft. I soon tired of hand winding over 2,000 ft of line although it developed the bicepts!.




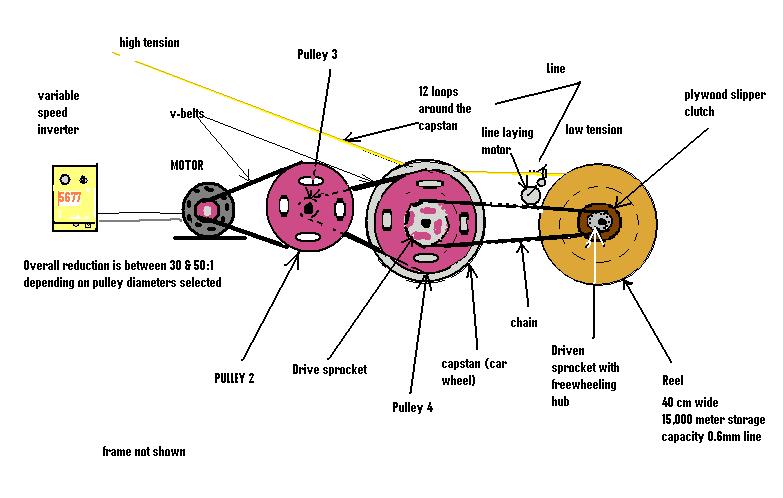
The Teco FM50 inverter is inside a custom control box. The FM50 uses clever robust electronics in conjunction with a processor to provided a wide range of speed and torque characteristics to an AC motor. The motor can spin from a few revolutions per second up to 6000 rpm, over double it's normal speed while maintaining good torque. It has forward, reverse and intelligent thermal protection which vutually eliminates damage from overload. I have also incorporate a forward/reverse control switch for the line layering motor.
The 2005 version with chain drive and 1/2 hp motor without inverter.
The 2010 version reverted to belt drive and also incorporated an uncontrolled backup motor.
Dyneema®, the world’s strongest fiber™

Designing and building a winch is not difficult for a person with a modicum of mechanical knowledge, the ability to draw simple designs and use basic tools such as a hammer, drill, screw drivers and a set of spanners. I was fortunate in that I studied mechanical engineering and engineering drafting although I never completed my degree. The design brief was to build a robust machine that could stand up to the rigors of outdoor use, be transport on a trailer and was affordable with a small budget. Fortunately, I could see many good commercial fishing, industrial and mining winches on the Internet so I just need to transfer the principles of these designs and scale them down to a version that could control 15 km of line at tensions of up to 200 lbs. Subsequent record attempts with the line tension gauge have shown the maximum tension to be 130 lbs with the 12 sq metre DT deltas we have used for record attempts over the last 10 years. The motor and pulley design needed to provide enough startup torque to counter maximum line pull and enough line speed to just keep a kite aloft in calm conditions but the kite would drop in hot calm conditions despite running the winch motor at maximum speed. These parameters need to be measured. The line tension was measured flying one of our record attempt kites in 15 - 30 knot gusty winds. I measured 79 lbs maximum tension. I also applied some known values to flat surfaces with Cda and surface area. Maximum line tension was calculated as 160 lbs in 40 knot winds. In fact, 130 lb tension had been recorded in 2012 with 40 kt winds. The minimum wind speed required was measured as 5 knots or 2.8 m/s. The belt and pulley drive system gave a reduction ratio of 36:1. Originally the 1/2 hp motor's stock speed was 2850 rpm producing 80 meters per minute, 4.8 kph or near to 2.4 knots line speed. A 60-mm pulley gave better torque but slower line speed. We needed double that but that was to come with the later winch version. This rebuild was forced by the failure of the first electric motor during the October 2005 incident. The earlier version was powered by a 1/2 hp single phase AC motor with reversing switch. By the second series of attempts in October 2005, the motor proved to be inadequate.
The winch system needed to not only produce the required torque and output speed but needed to run reliably every day, all day. For that we also needed a reliable generator as there is no on field mains power supply. The original generator was a Chinese made Yamaha copy and the first one failed, needing to be replaced under warranty. The replacement ran fine for 2 record attempts but unfortunately was damaged in the trailer during a trip to the Eastern suburbs for testing. This generator and electric motor combination proved marginal in power output anyway so the replacement generator was a good price and also more than double the power at 5.5 hp. It is able to provided plenty of grunt for the winch as well as laptop, fans, floodlights and electric jugs. It is capable of running a decent welder which I hope is never needed.
The control for the original electric motor was just a on/off/reversing switch although this feature needed to be wired by a motor specialist. Without speed control, the motor is limited in its ability to finely attune kite and wind speed. It also requires excessive motor on-off cycles, stressing the internal motor control and the control switch. After the first motor burned out I upgraded with a more powerful TECO motor and added a FM50 TECO inverter/controller. The motor was 1 hp or 0.74 kw. The inverter has a programmable interface which can vary the torque curve at various speeds and when slowing down among a host of other features. it was certainly a leap forward in line control. It enables the standard 2,850 rpm to be doubled to 6,000 rpm for up to a minute. Normally I limit the overspeed to 4,350 rpm or 50% over the standard of 2850 rpm. This overspeed capability is important as it gives me the ability to give the kite a quick boost up, analogous to giving the line a quick tug. The kite can also be sustained if the wind drops to zero. This system is more than capable of performing all the intended roles except for high speed freewheeling to alleviate the situation that occurred on September 30th prior to line break. The new motor purchased in 2013 showed a big leap in performance with a 50% increase in torque and power. Where the previous motor was at its limit at 120 lbs, this motor takes those tensions in its stride. It is also able to sustain 4,000 rpm indefinitely reeling in line at 2.6 meters/sec (9 kph) and an overspeed ability to 3.5 m/s or 12 kph.
The capstan is a steel wheel from a late mid 80's Ford falcon sedan and has a capstan surface of exactly 1000 mm. This was a bonus as it makes it very easy to calibrate the line payout meter from a digital electronic cycle odometer/speedometer. The first capstan was a wobbly thing which showed that the wheel must have been on a cat that struck a big pothole or a curb. I replaced it last year and along with some fabrication and welded disks, the wheel is smoother without runout. This keeps the line much neater on the capstan.
We discovered in 2012 that the line on the capstan was very orderly on wind-in but was disorganised on line release. We eventually realised that the line needs tension on the input side to remain orderly on the capstan. This appeared to be a trivial issue but has actually caused two kite losses when line had become tangle on the winch frame and been damaged. Applying tension constantly with a gloved hand for the 2014 flights was tedious but very effective. A permanent solution will be incorporated into the winch design for future high altitude flights.
The slipper clutch was modified before the 2014 attempts. The disk is now faced with rubber cut from a backing disk for a drill sander. The runout problem was solved by fixing 6 lateral ball bearings to keep the driving disk aligned. Spring tension was increased and combined with the higher friction coefficient between the aluminium reel side and rubber facing, provides faster acceleration of the storage reel on startup and greater line tension to storage. The disk brake on the intermediate drive shaft was a great addition to the winch's capability. The kite, with the double spreader was able to provide enough pull to rotate the capstan without needing winch power for 95% of the ascent. The speed was easily modulated with the brake actuation lever although sometimes the brake was noisy. The sprockets and chain has been replaced with belt and pulleys. A future winch will have to be larger and capable of handling line tensions of up to 550 lbs. That will require a 6 hp+ electric motor and a larger generator and motor contoller.
The winch system needed to not only produce the required torque and output speed but needed to run reliably every day, all day. For that we also needed a reliable generator as there is no on field mains power supply. The original generator was a Chinese made Yamaha copy and the first one failed, needing to be replaced under warranty. The replacement ran fine for 2 record attempts but unfortunately was damaged in the trailer during a trip to the Eastern suburbs for testing. This generator and electric motor combination proved marginal in power output anyway so the replacement generator was a good price and also more than double the power at 5.5 hp. It is able to provided plenty of grunt for the winch as well as laptop, fans, floodlights and electric jugs. It is capable of running a decent welder which I hope is never needed.
The control for the original electric motor was just a on/off/reversing switch although this feature needed to be wired by a motor specialist. Without speed control, the motor is limited in its ability to finely attune kite and wind speed. It also requires excessive motor on-off cycles, stressing the internal motor control and the control switch. After the first motor burned out I upgraded with a more powerful TECO motor and added a FM50 TECO inverter/controller. The motor was 1 hp or 0.74 kw. The inverter has a programmable interface which can vary the torque curve at various speeds and when slowing down among a host of other features. it was certainly a leap forward in line control. It enables the standard 2,850 rpm to be doubled to 6,000 rpm for up to a minute. Normally I limit the overspeed to 4,350 rpm or 50% over the standard of 2850 rpm. This overspeed capability is important as it gives me the ability to give the kite a quick boost up, analogous to giving the line a quick tug. The kite can also be sustained if the wind drops to zero. This system is more than capable of performing all the intended roles except for high speed freewheeling to alleviate the situation that occurred on September 30th prior to line break. The new motor purchased in 2013 showed a big leap in performance with a 50% increase in torque and power. Where the previous motor was at its limit at 120 lbs, this motor takes those tensions in its stride. It is also able to sustain 4,000 rpm indefinitely reeling in line at 2.6 meters/sec (9 kph) and an overspeed ability to 3.5 m/s or 12 kph.
The capstan is a steel wheel from a late mid 80's Ford falcon sedan and has a capstan surface of exactly 1000 mm. This was a bonus as it makes it very easy to calibrate the line payout meter from a digital electronic cycle odometer/speedometer. The first capstan was a wobbly thing which showed that the wheel must have been on a cat that struck a big pothole or a curb. I replaced it last year and along with some fabrication and welded disks, the wheel is smoother without runout. This keeps the line much neater on the capstan.
We discovered in 2012 that the line on the capstan was very orderly on wind-in but was disorganised on line release. We eventually realised that the line needs tension on the input side to remain orderly on the capstan. This appeared to be a trivial issue but has actually caused two kite losses when line had become tangle on the winch frame and been damaged. Applying tension constantly with a gloved hand for the 2014 flights was tedious but very effective. A permanent solution will be incorporated into the winch design for future high altitude flights.
The slipper clutch was modified before the 2014 attempts. The disk is now faced with rubber cut from a backing disk for a drill sander. The runout problem was solved by fixing 6 lateral ball bearings to keep the driving disk aligned. Spring tension was increased and combined with the higher friction coefficient between the aluminium reel side and rubber facing, provides faster acceleration of the storage reel on startup and greater line tension to storage. The disk brake on the intermediate drive shaft was a great addition to the winch's capability. The kite, with the double spreader was able to provide enough pull to rotate the capstan without needing winch power for 95% of the ascent. The speed was easily modulated with the brake actuation lever although sometimes the brake was noisy. The sprockets and chain has been replaced with belt and pulleys. A future winch will have to be larger and capable of handling line tensions of up to 550 lbs. That will require a 6 hp+ electric motor and a larger generator and motor contoller.